
En de First Lego League ook.
Hardware
439 posts

Kijken of ik het kan versnellen.

De beste smartphone van 2021 is een tablet.

Mijn Samsung Galaxy S9 heeft 64GB intern geheugen en de mogelijkheid om via een microSD kaartje de interne opslag uit te breiden. Door de jaren heen heeft zich op het toestel een aardige hoeveelheid foto’s en filmpjes verzameld. Want tja, al doen we tegenwoordig “alles in de cloud” er zijn genoeg moment (bv als ik op vakantie ben) waarop ik lekker […]
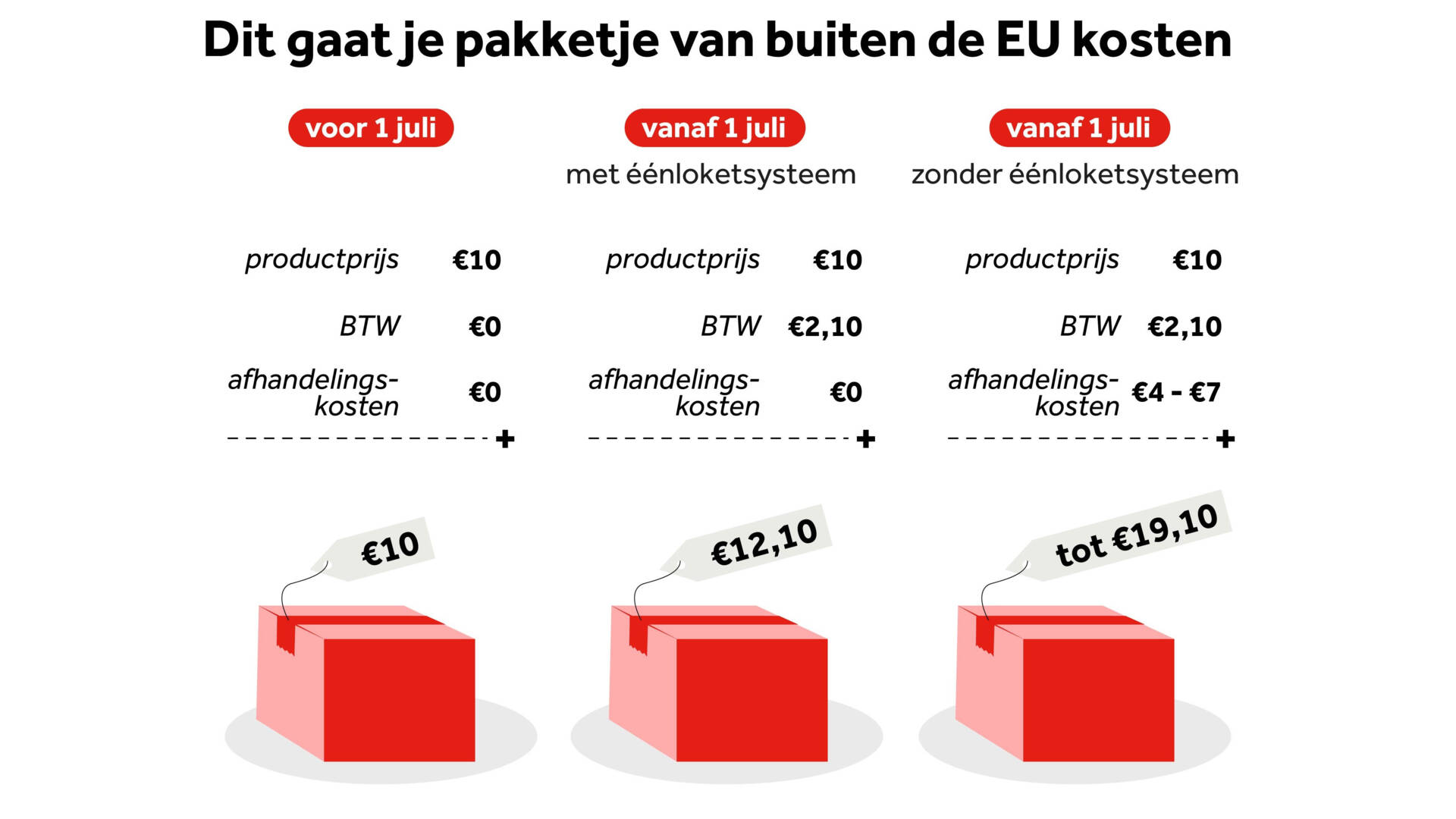
Na 1 juli ook BTW op goedkope producten.

Mijn thuiswerkplek is na ruim een jaar thuiswerken eindelijk van een upgrade voorzien.
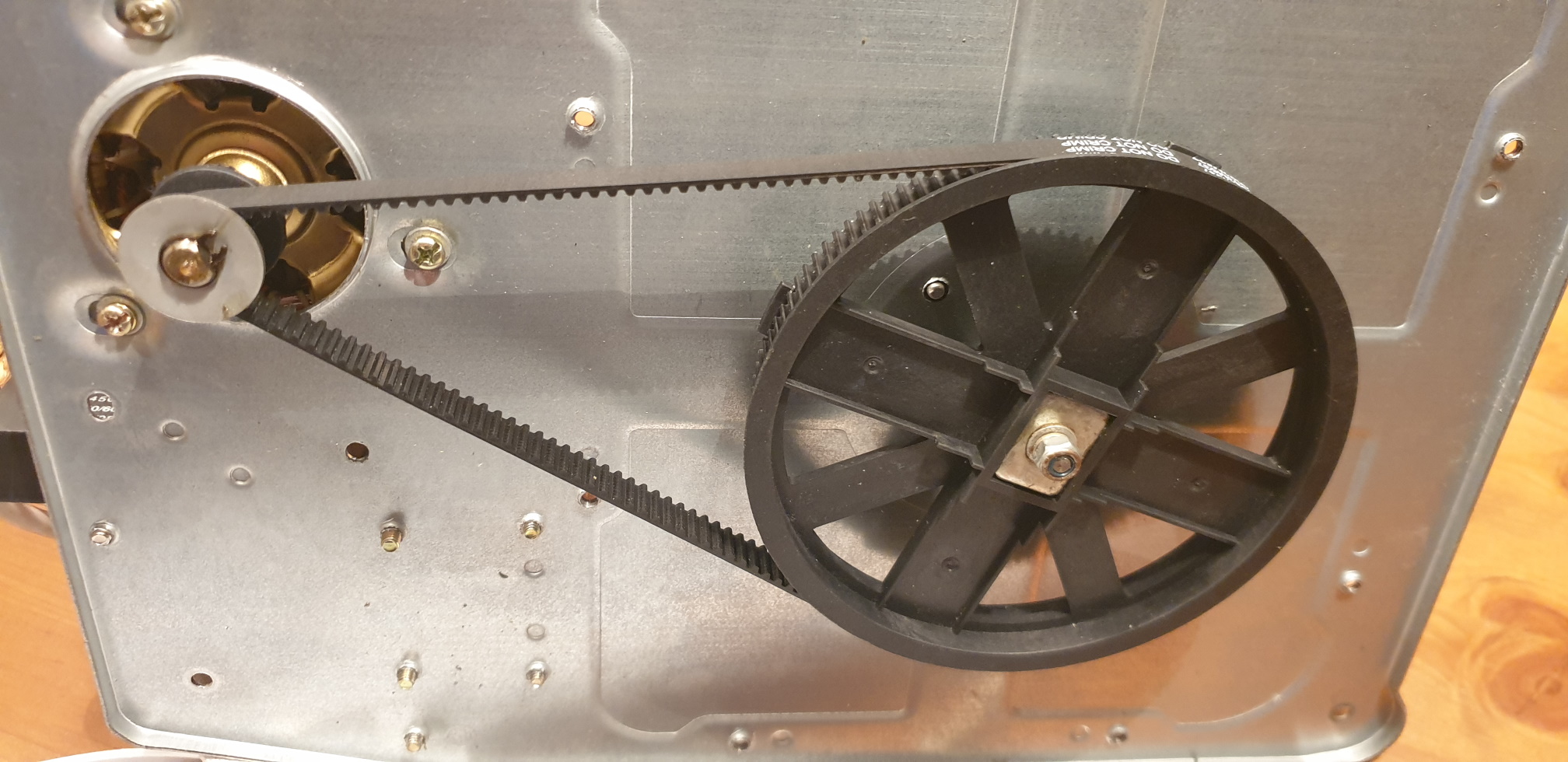
Klik om af te spelen ▶ Bekijk op YouTube Afgelopen weekend schreef ik over onze broodbakmachine die het niet meer deed. Ik was toen zover gekomen dat ik hem uit elkaar gehaald had en geconstateerd had dat het inderdaad om een versleten aandrijfriem ging. Die was gelukkig nog gewoon te bestellen en gisteren kwam hij via de post binnen. Terwijl Niek […]

De broodbakmachine deed het niet meer. Weggooien of niet?

Kun je een Easy Bake Oven gebruiken als reflow-oven voor SMD?

{kind=link}
{kind=link}
Een Microsoft tablet met Android? Het bestaat echt. Maar voor hoelang?