Driedelige MOOC serie ook voor wie nog helemaal niets van machine learning afweet.
Hardware
827 posts
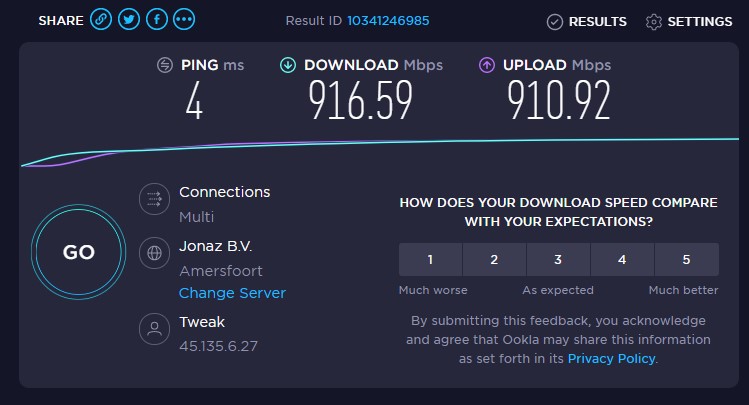
Als je interne netwerk opeens niet meer veel sneller is dan je internetverbinding dan is het tijd om te kijken wat er te optimaliseren valt.

Een Microsoft tablet met Android? Het bestaat echt. Maar voor hoelang?

Kleiner dan de nagel van mijn pink, maar met 128GB opslag voor minder dan 3 tientjes.
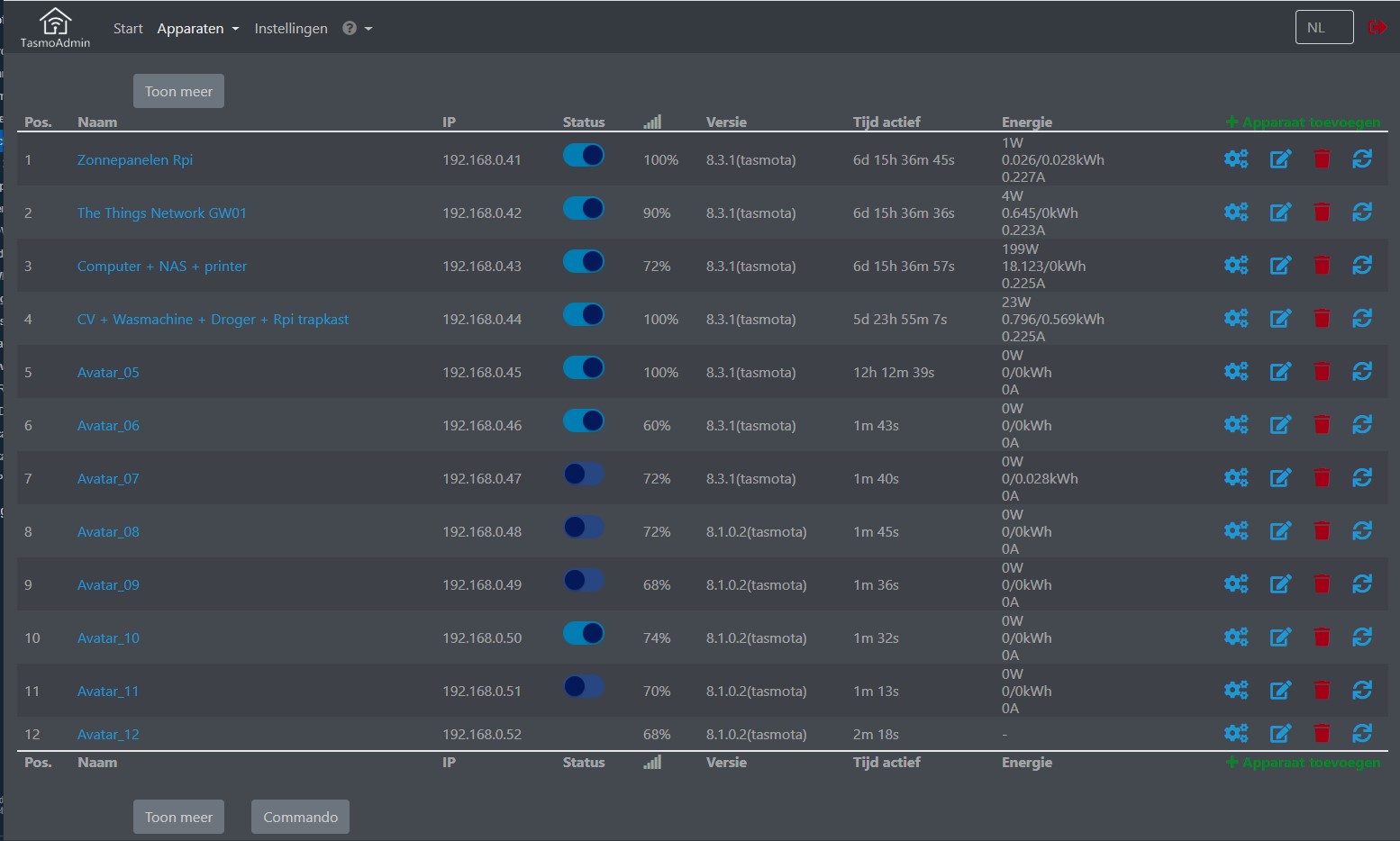
Since this is a rather technical post, I’ll do it in English, increasing the chance of people being able to use it a lot. Recently I bought a number of smart power plugs, sold via Amazon (.de) and produced by Avatar. Note that they sell 2 different types: the ones with and without power measurement. Strangely enough, at the moment the […]
In de categorie: het is vakantie en dus eindelijk tijd voor…. Ik had al een tijdje een viertal Avatar AWP07L Power Monitoring Plugs liggen. Afkomstig van Amazon in Duitsland, zijn het stekkerplugs die je tussen een apparaat (of apparaten) en het stopcontact plugt. Er zit een handmatige knop op om de plug aan en uit te zetten, maar uiteraard kun je ze […]

Terwijl deel 2 net uit is ben ik dit weekend pas gestart met deel 1 van The Last of Us. Ik ben al een heel eind, het is winter en Ellie heeft al laten zien dat ze ook zonder Joel weet te overleven (hij is even uitgeschakeld). De PS4 waar ik het spel op speel is tijdelijk hier, maar dat is […]

Je hebt vast al een keer de voorbeelden gehoord waarbij mensen typemachines, harde schijven, floppydrives, gebruiken om muziek te maken. Device Orchestra toets iets vergelijkbaars, maar dan in de overtreffende trap. Neem bijvoorbeeld onderstaande clip: Klik om af te spelen ▶ Bekijk op YouTube Zoals je in de titel ook kunt lezen zijn dit zeven verschillende elektronische apparaten die elk hun […]

Klik om af te spelen ▶ Bekijk op YouTube Hij kwam voor mij voor het eerst voorbij in een tweet van Ashwin Brouwer een paar dagen geleden met updates voor Microsoft Teams. Ashwin wees toen op de mogelijkheid die er aan zat te komen om je hand op te steken in Microsoft Teams. Een optie die veel docenten op prijs zouden […]

{kind=link}
Klik om af te spelen ▶ Bekijk op YouTube Een deurbel met een camera staat erg laag op mijn lijstje van apparaten die ik altijd al eens had willen aanschaffen. Maar ja, ook ik herken zonder problemen het Ring chime geluid, al zou ik moeite hebben met het noemen van een tweede concurrerend merk. Toen bij The Hook Up vier deurbellen […]