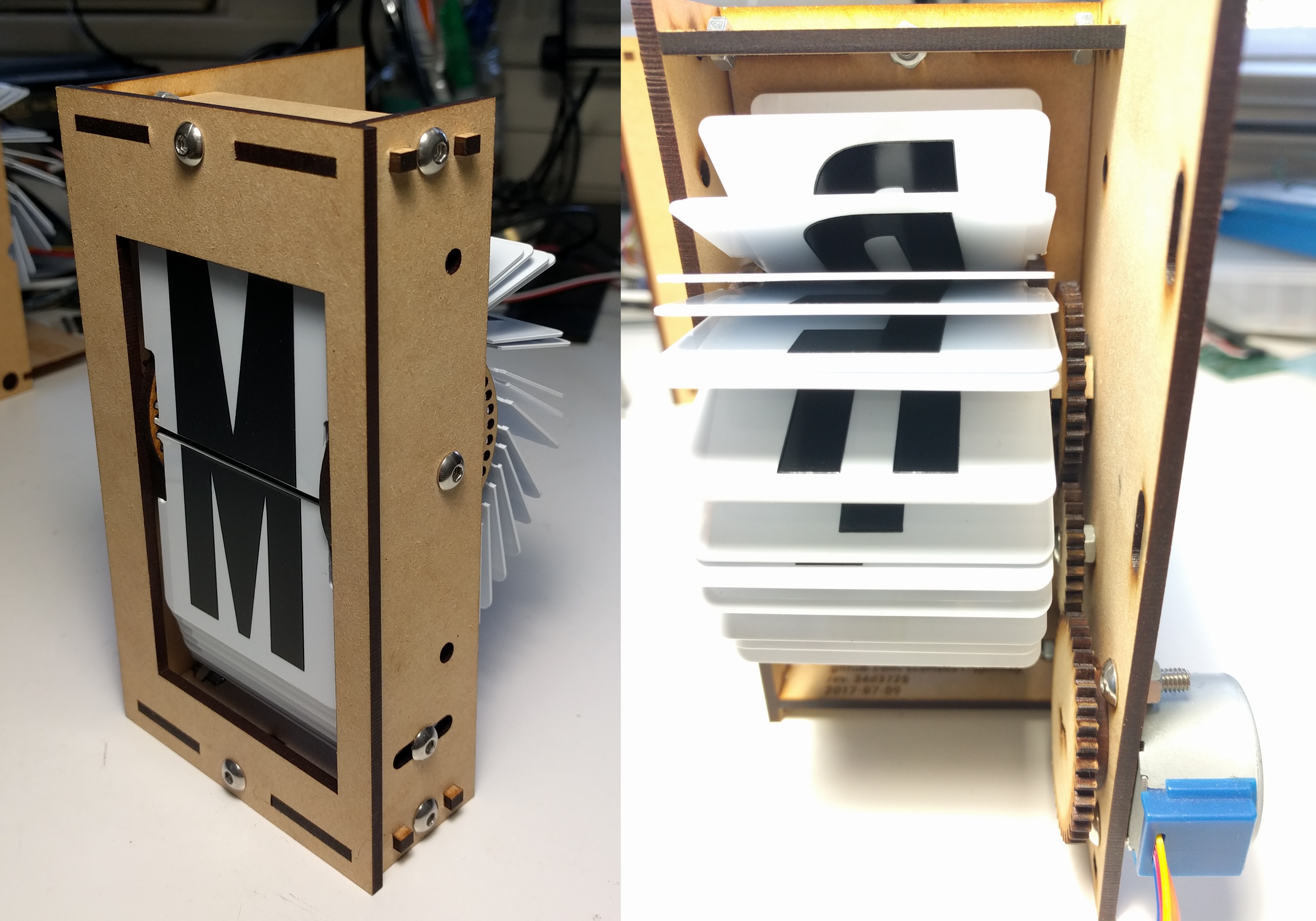
Klik om af te spelen ▶ Bekijk op YouTube WOW is een geheel terechte uitspraak als het gaat om dit project. Het is geen “weekendprojectje”, je ziet het resultaat van 2,5 jaar ontwikkelen door Scott Bezek en verschillende versies. Het heeft zo ongeveer alles in zich wat je kunt verzinnen: het ontwerp van de behuizing zodat het met een lasersnijder gemaakt […]
Arduino
56 posts
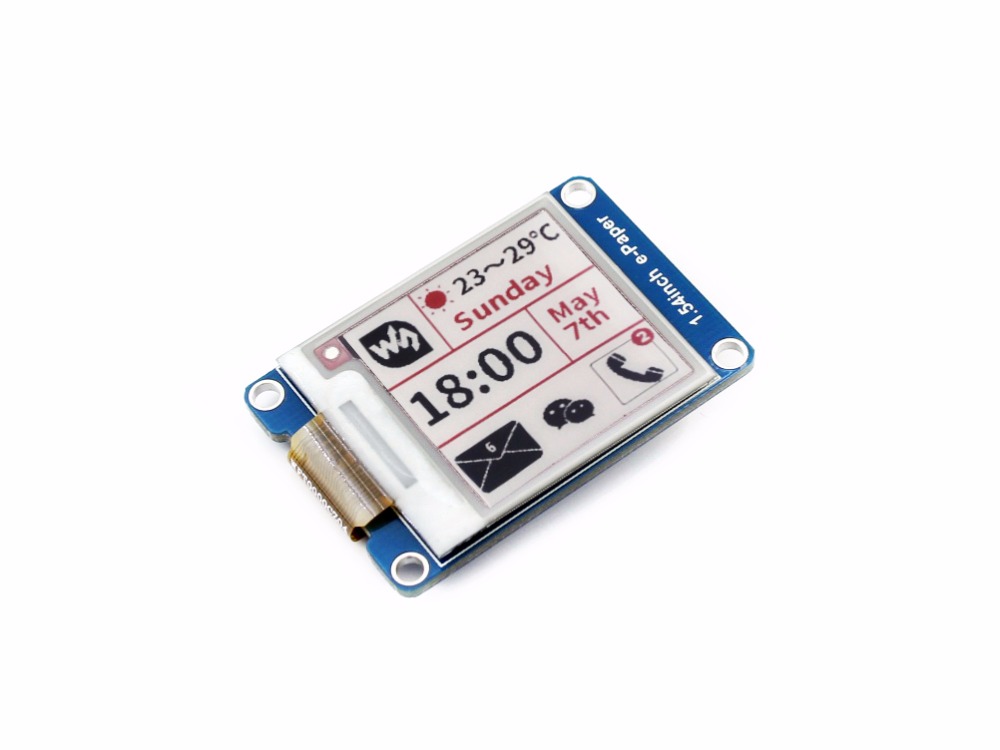
Klik om af te spelen ▶ Bekijk op YouTube Via de enthousiaste video’s van Nick van Educ8s kwam ik afgelopen week erachter dat ePaper displays voor Arduino en Raspberry Pi inmiddels goedkoop genoeg zijn geworden om ook voor eigen hobbyprojecten zinvol te zijn. Het voordeel van een ePaper display is uiteraard het lage energieverbruik, nadeel is de lage beeldverversingsfrequentie en het […]

Een eenvoudige vraag over een LCD scherm zorgde voor 1,5 uur testen en uitproberen. Maar toen werkte het!
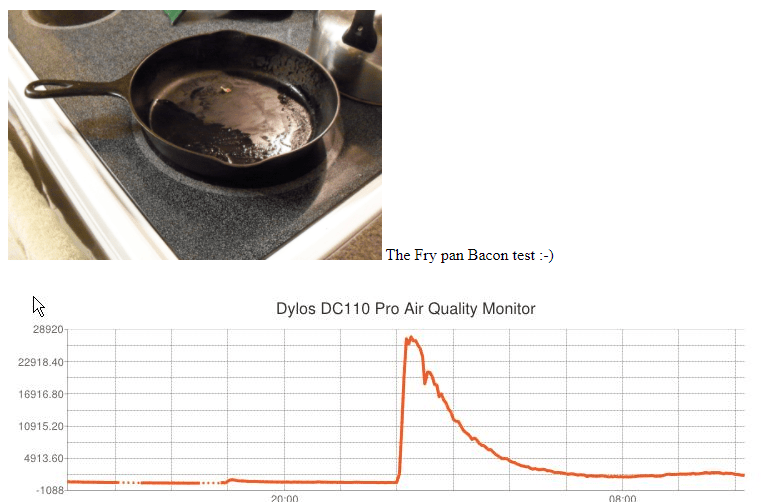
OK, één bericht nog dan voordat ik ga schrijven over onze eerste fijnstofmeter die (als alles volgens plan gaat) ook tijdens de jaarwisseling online te volgen is. Naast de bestelde Shinyei PPD42 die vorig jaar door het RIVM gebruikt is, hebben we een tweetal DSM501 modules van Samyong in huis en blijkt er nog een Plantower PMS5003 onderweg te zijn die (vanwege een […]

Als je een beetje begint te lezen over een onderwerp dan ontdek je dat je er eigenlijk helemaal niets over wist.
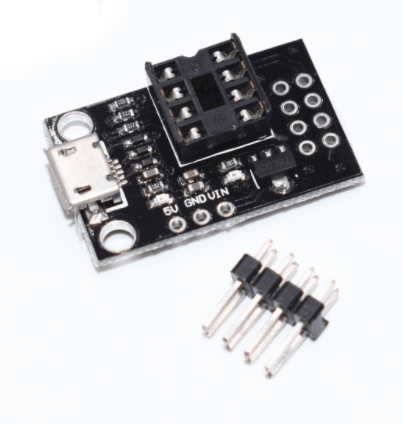
Hoewel ik al ervaring had met het programmeren van een ATTiny85 als die onderdeel was van een Digispark board (links op de foto), heb ik dit weekend geleerd dat het programmeren van een losse chip (rechts op de foto, de andere 9 exemplaren zitten in het buisje erboven) iets ingewikkelder is/was. Was eigenlijk omdat het nu ik het een keer gedaan heb […]

Ondanks alles zijn kinderen nog lang niet zo’n nerd of geek als hun papa is. En hoewel ik natuurlijk sowieso helemaal niet over ze mag klagen, kreeg ik vandaag toch nog wel weer wat meer hoop. Vandaag kwam namelijk weer eens een pakje uit China binnen. Nu met zo’n “bekende” 37-in-1 sensorkit. Een zakje (ik had niet gekozen voor de duurdere […]

Klik om af te spelen ▶ Bekijk op YouTube Via Adafruit kwam ik bovenstaande video van KaneFernandes Design, een 19 jarige student Product Design aan de Middlesex Universiteit in London. De titel is een beetje misleidend, er staat “360º Smartphone Camera Drone Rig using Arduino Uno & XBEE“, er wordt niet echt gebruik gemaakt van een drone, maar van de motor + propellor […]
Als het in het onderwijs in Nederland over “programmeren” gaat worden eenvoudige vragen al heel snel ingewikkeld. Dus een vraag als “Welke programmeertalen zouden onze leerlingen/studenten moeten kennen?” (bron) is niet helemaal zonder risico. Immers, je moet dan gaan nadenken over het doel dat je daarmee hebt. Wil je ze leren programmeren? Of juist coderen? Of software ontwikkelen? Ik ga niet […]

What happens if you take a LoRaWAN node with you in a train while you travel across the Netherlands for about 2,5 hours? I did not know and wanted to find out today because I had to be in Zwolle for a meeting. So I charged a big external battery (with 2 USB ports), drilled a couple of holes in a […]